Onderzoekers van de TU Delft hebben programmeerbare actuatoren ontwikkeld die bestaan uit zowel harde als zachte materialen. Deze combinatie maakt het mogelijk complexe bewegingen te maken. De onderzoekers zien veel potentie in het gebruik van hun ontwikkeling in zachte robots, die veilig en efficiënt met zowel mensen als kwetsbare voorwerpen kunnen omgaan.
De onderzoekers van de TU Delft beschrijven hun bevindingen in een editie Materials Horizons die begin deze maand is verschenen. “Robots zijn meestal groot en zwaar. Maar je wilt ook robots hebben die voorzichtig te werk kunnen gaan, bijvoorbeeld als ze met weke delen in het menselijk lichaam omgaan. Het vakgebied dat dit onderwerp bestudeert, zachte robotica, wordt nu snel populairder”, licht prof. Amir Zadpoor, die het onderzoek heeft begeleid, toe in een artikel op de website van de TU Delft.
Zachte grip en snelle beweging
“Je bent eigenlijk op zoek naar iets met vergelijkbare kenmerken als de menselijke hand, zoals een zachte grip, snelle maar toch precieze bewegingen, en kracht. Dat proberen we met onze zachte programmeerbare materialen uit de 3D-printer te bereiken.”
Zachte robots, waarvoor vaak de Engelse term ‘soft robotica’ wordt gebruikt, kunnen dankzij hun zachte aanraking veilig en efficiënt met zowel mensen als tere voorwerpen omgaan, zonder dat hierbij het risico bestaat op verwondingen of beschadigingen. Bij de ontwikkeling van dergelijke zachte robots is de aandrijving een uitdaging: de aandrijving van robots bestaat doorgaans uit harde componenten. Deze zijn niet geschikt voor zachte robots, die juiste en programmeerbare actuatoren vereisen.
Mechanische instabiliteit
De oplossing zit in flexibele metamaterialen die op basis van mechanische instabiliteit. Deze materialen bieden volgens de onderzoekers van de TU Delft ‘ ongekende functies die in het materiaal zelf geprogrammeerd zijn’. wat de zeer geschikt maakt voor zachte materialen. “De aanpasbaarheid van de mechanische metamaterialen die tot nu toe zijn voorgesteld was echter erg beperkt”, zegt onderzoeker en hoofdauteur Shahram Janbaz.
“We presenteren nu een aantal nieuwe ontwerpen van ultraprogrammeerbare mechanische metamaterialen waarbij niet alleen de aandrijfkracht en amplitude maar ook de aandrijfmodus binnen een heel wijd bereik kan worden gekozen en ingesteld. We geven ook een aantal voorbeelden van hoe deze zachte actuatoren in robotica zouden kunnen worden gebruikt, bijvoorbeeld als drukwisselaar, kinematische controller en als pick&place-eindeffector.”
Vervorming
De functie zit volgens Zadpoor in het materiaal zelf. “We moesten het fenomeen van vervorming daarom beter bestuderen. Ooit werd het als het toppunt van slecht ontwerp beschouwd, maar in de afgelopen paar jaar is die eigenschap onder controle gekregen en wordt het gebruikt om mechanische metamaterialen met geavanceerde functies mee te ontwerpen. Zachte robotica in het algemeen en zachte actuatoren in het bijzonder kunnen enorm van zulke designmaterialen profiteren. Of het enorme potentieel van vervorming echt kan worden ingezet hangt ervan af of de grootste beperking van de ontwerpen die tot nu toe zijn gepresenteerd kan worden verholpen: de beperkte programmeerbaarheid ervan. Wij konden hogere vervormingsgradaties berekenen en voorspellen en het materiaal hier vatbaarder voor maken.”

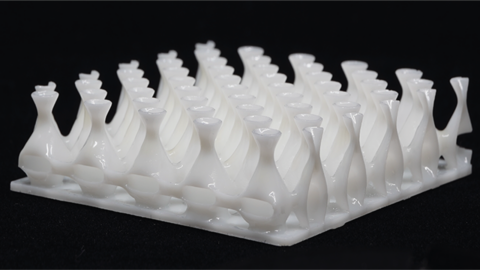
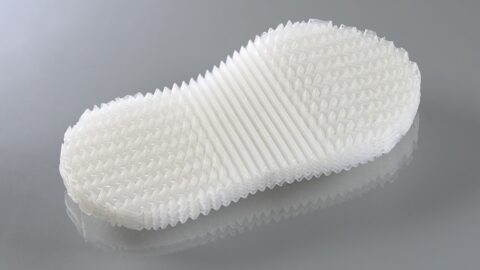
De zachte actuatoren van de TU Delft (bron foto: TU Delft)
De onderzoekers prenteren metamaterialen van meerdere materialen die worden aangedreven door vervorming en zeer programmeerbaar zijn. Janbaz: “We hebben rationele ontwerpbenaderingen gecombineerd met voorspellende rekenmodellen en met geavanceerde, ‘additive-manufacturing’-technieken waarbij meerdere materialen worden gebruikt om met de 3D-printer cellulaire materialen te printen met arbitraire verdelingen van harde en zachte materialen in de centrale delen en hoeken van hun eenheidscellen. We hebben als belangrijkste ontwerpparameters de geometrie en ruimtelijke verdeling van materiaaleigenschappen gebruikt en hiermee zachte metamaterialen ontwikkeld die zich als mechanismen gedragen waarvan de aandrijfkracht en amplitude kunnen worden aangepast.”
Auteur: Wouter Hoeffnagel