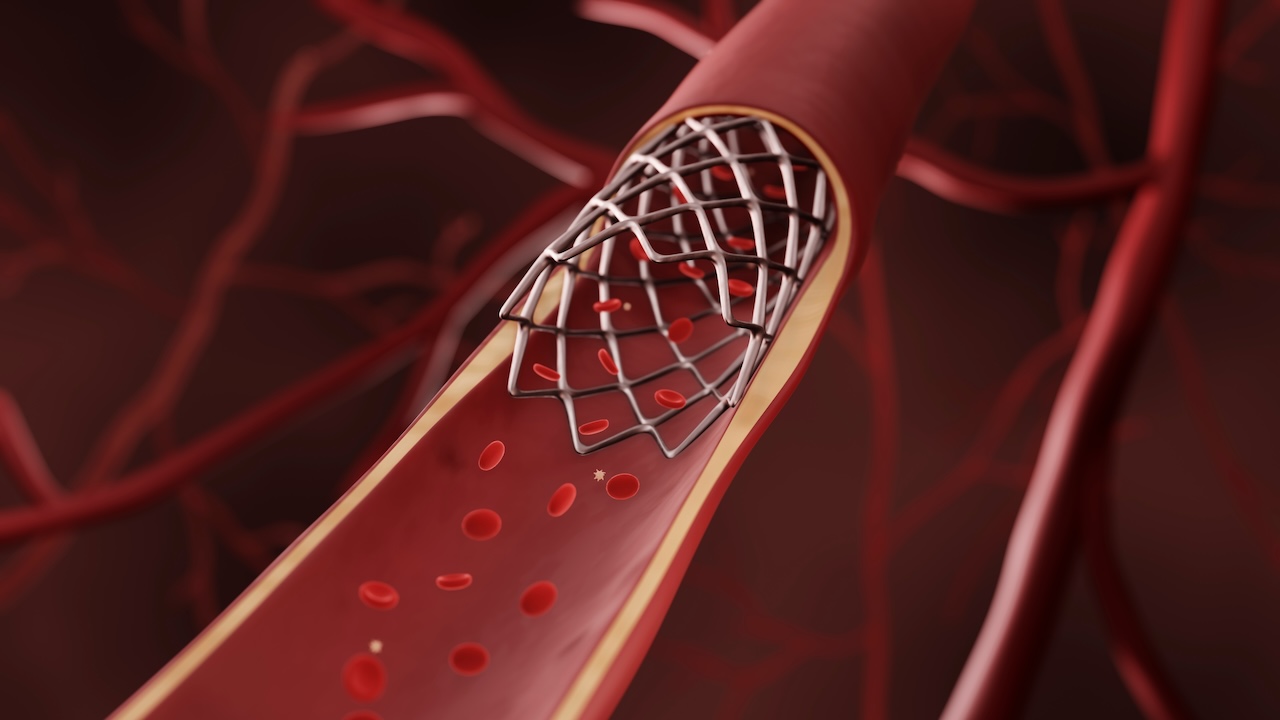

Een nieuw robotplatform kan kleine, zachte en flexibele robots met behulp van kunstmatige intelligentie (AI) autonoom door de bloedvaten van een mens laten navigeren. Zo kunnen ingrepen om bijvoorbeeld bloedstolsels te behandelen veiliger, sneller en minder ingrijpend worden uitgevoerd.
Het platform is ontwikkeld door onderzoekers van de Concordia Universiteit. De methode maakt gebruik van kleine, zachte en flexibele robots. Deze zijn gefabriceerd van een biocompatibel rubberachtig materiaal dat microdeeltjes bevat, waardoor ze draadloos kunnen worden bestuurd met behulp van externe magneten.
Behandelingen veiliger maken
De onderzoekers stellen dat het platform risico’s zoals het beschadigen of perforeren van vaatwanden terugdringt, en zo behandelingen veiliger maakt. “Draadloze magnetische velden openen veel toepassingsmogelijkheden voor de gezondheidszorg en minimaal invasieve chirurgie,” aldus Ramin Sedaghati, hoogleraar aan de afdeling Werktuigbouwkunde, Industrieel Ontwerp en Luchtvaarttechniek van de Gina Cody School of Engineering and Computer Science en een van de auteurs van het artikel.
“Deze kleine magnetische zachte robots worden bevestigd aan de uiteinden van conventionele katheters en chirurgische draden, waardoor chirurgen de robot met een kabel kunnen sturen naar obstakels, de ingreep kunnen uitvoeren en deze weer kunnen terugtrekken met minder risico.” Tijdens testen verminderde het systeem het aantal ‘navigeerfouten’ tot 77% ten opzichte van conventionele methoden. Ook melden de onderzoekers dat de besturing minder inspanning vergde.
Bestuurd met een robotarm
Om door de bloedvaten te kunnen reizen zijn de robots ongeveer een millimeter groot. De robots worden bestuurd met behulp van een krachtige magneet, die is gemonteerd op een robotarm met zes assen. Door de hoek en positie van de magneet aan te passen, kunnen de onderzoekers de zachte robot nauwkeurig buigen en bewegen.
Magnetische robotsystemen zijn niet nieuw. De onderzoekers melden dat veel bestaande platforms zogeheten open-loopbesturingsmethoden gebruiken, waarbij de aansturing plaatsvindt zonder feedback over de daadwerkelijke positie of snelheid. Het systeem voert vooraf ingestelde instructies uit, maar houdt geen rekening met eventuele afwijkingen en corrigeert deze niet.
Het nieuwe robotplatform maakt echter gebruik van een closed-loopbesturingssysteem, dat de positie van de robot continu meet en vergelijkt met de gewenste waarden. Dit maakt het mogelijk de besturing tijdens de navigatie aan te passen op eventuele afwijkingen, wat de nauwkeurigheid vergroot.
AI-modellen
Het robotplatform maakt gebruik van een AI-model, dat door de onderzoekers is ontwikkeld. Dit model combineert analytische methoden met deeplearning om het gedrag van de robot te voorspellen. Het houdt daarbij rekening met veranderende magnetische krachten, zwaartekracht en vloeistofstromen zoals die in het menselijk lichaam voorkomen.
Een tweede deeplearning-model detecteert de vorm en positie van de punt van de robot op basis van beelden van een hogesnelheidscamera. Dit model maakt het mogelijk de positie en vervorming van de robot in realtime te volgen, waardoor de onderzoekers feedback konden geven om de werking van het platform te verfijnen.
Experimenten
Het platform is getest met een reeks in vitro-experimenten die echte chirurgische omstandigheden nabootsten. Daarnaast bouwden de onderzoekers transparante vloeistofkanalen die vaatomgevingen met stromende vloeistof simuleerden. Uit de experimenten bleek
Het closed-loopbesturingssysteem presteerde tijdens de experimenten consequent beter dan conventionele besturingsmethoden, met een grotere nauwkeurigheid, stabiliteit en weerstand tegen verstoringen veroorzaakt door vloeistofstroom.
De onderzoekers hebben de resultaten van hun onderzoek gepubliceerd in Smart Materials and Structures.