
Onderzoekers van het Fraunhofer Instituut voor Fabrieksautomatisering (IFF) hebben cognitieve robotica-capaciteiten ontwikkeld die complexe taken in de productie kunnen uitvoeren die voorheen onmogelijk te automatiseren waren. Daarnaast onthullen ze ook gepatenteerde snelheids- en afstandsbewaking en computerondersteunde veiligheid (CAS).
Cognitieve robotica
Onderzoekers van Fraunhofer IFF gebruiken nieuwe AI-gebaseerde oplossingen om robots de cognitieve vaardigheden te geven die ze nodig hebben om autonoom te opereren in ongestructureerde, veranderende omgevingen. Met cognitieve robotica wordt het mogelijk om complexe processen te automatiseren, zoals montage en demontage in industriële omgevingen of het hanteren van objecten in de gezondheidszorg.
Projectie- en cameragebaseerde veiligheidstechnologieën
Projectie- en cameragebaseerde veiligheidstechnologieën stellen robots met AI-gebaseerde bewegingsbesturing in staat om betrouwbaar te reageren op veranderingen, zich aan te passen aan nieuwe taken en een toepassing veilig te bedienen. Dit opent een breed scala aan nieuwe toepassingsgebieden die voorheen waren uitgesloten van conventionele robotica, die zich beperkt tot specifieke, nauw omschreven taken. Cognitieve robotica zorgt ervoor dat de robots kunnen leren van ervaring, zelfstandig beslissingen nemen en zich aanpassen aan verschillende scenario’s.
Pick-and-place
Voor pick-and-place-taken waarbij componenten worden opgepakt en op de juiste plek worden neergezet, hoeft een cognitieve robot niet langer te leren hoe de afzonderlijke werkstukken eruitzien voordat hij ze kan grijpen. In plaats daarvan gebruikt hij een camera om de grootte, vorm, textuur en conditie van het object te registreren en past hij zijn gedrag daarop aan. Daarbij kan hij omgaan met verschillende omgevingsomstandigheden en zelfs verschillende verpakkingsmaterialen”, aldus Magnus Hanses, hoofd van de Cognitive Robotics-groep bij Fraunhofer IFF.
De cognitieve robot gebruikt een camera om de grootte, vorm, textuur en conditie van het object te registreren en past zijn gedrag daarop aan. Daarbij kan hij omgaan met verschillende omgevingsomstandigheden en zelfs verschillende verpakkingsmaterialen.Magnus Hanses, hoofd van de Cognitive Robotics-groep bij Fraunhofer IFF.
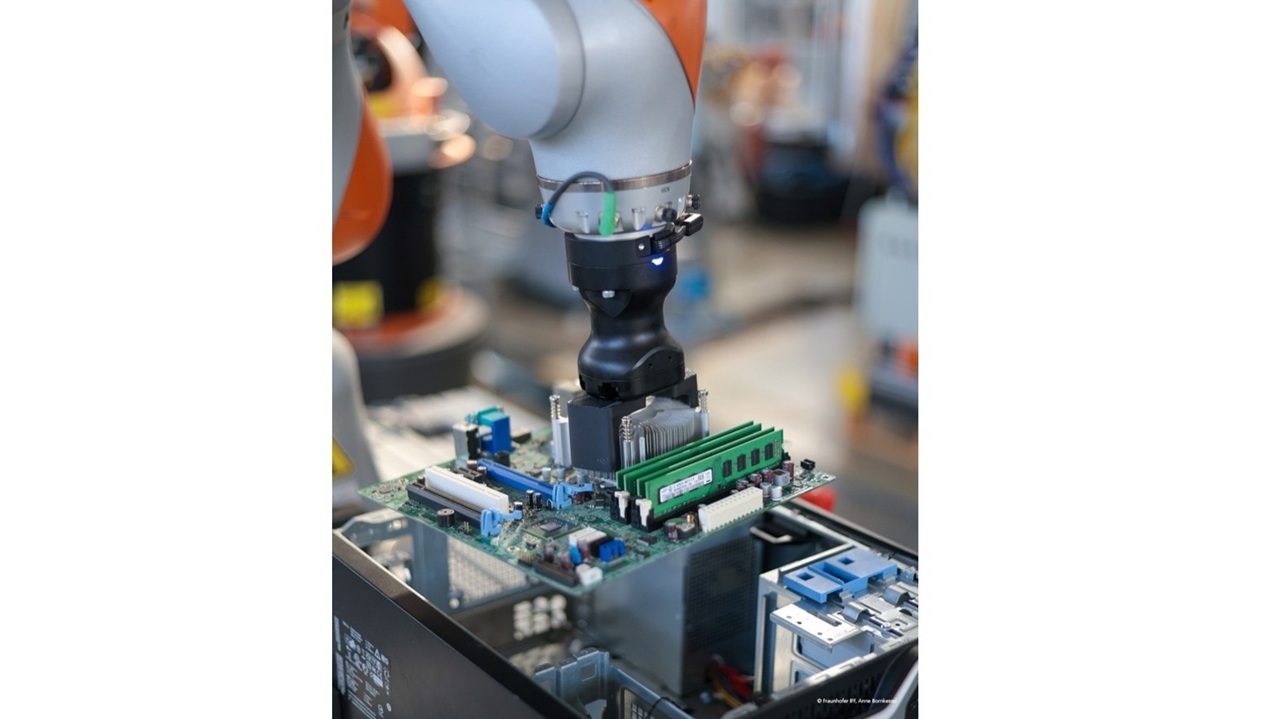
Cognitieve robotica in gebruik. Foto: Fraunhofer IFF, Anne Bornkessel
AI-modellen trainen
De experts gebruiken gesimuleerde omgevingen om de gebruikte AI-modellen te trainen. Ze simuleren bijvoorbeeld assemblage- en demontageprocessen, zoals het verwijderen van een moederbord uit een computer. Een onbeperkt aantal virtuele robots kan tegelijkertijd en veel sneller in de digitale ruimte werken, zonder veiligheidsrisico’s. Leren in digitale simulatie biedt veel voordelen, maar kent ook één kwetsbaarheid. De virtuele leeromgeving is nooit 100 procent hetzelfde als de echte wereld.
Sim2real kloof
De uitdaging voor de onderzoekers is om deze kloof tussen realiteit en werkelijkheid, ook wel bekend als de Sim2Real-kloof, zoveel mogelijk te dichten. Er zijn twee mogelijke benaderingen. De simulatie kan zo realistisch mogelijk worden ontworpen, of kan een zo breed mogelijk scala aan versies uit de echte wereld omvatten, zodat het neurale netwerk dat voor de AI wordt gebruikt, leert generaliseren en zijn weg vindt in onbekende omgevingen.
Domeinrandomisatie
Eén manier waarop de onderzoekers dit bereiken, is door middel van domeinrandomisatie. Deze aanpak stelt hen in staat om een groot aantal gesimuleerde omgevingen met willekeurige eigenschappen te creëren en een model te trainen dat in al deze omgevingen werkt. “Er zijn veel verschillende parameters, zoals belichting, die de simulatie beïnvloeden. We kunnen deze parameters tijdens de training wijzigen. De robot leert niet om de exacte simulatie op te lossen. In plaats daarvan leert hij het abstracte concept erachter te begrijpen. De realiteit wordt, om het zo maar te zeggen, gewoon een andere versie van een simulatie voor de AI”, legt Hanses uit.
PARU – gepatenteerde snelheids- en afstandsbewaking
Maar de cognitieve robotica staat nog voor een andere uitdaging. Momenteel is er geen manier om de veiligheid van door AI gegenereerde robotbewegingen te garanderen in overeenstemming met de veiligheidsnormen. Om ervoor te zorgen dat AI-gebaseerde robots in een veilige omgeving met mensen kunnen communiceren, hebben onderzoekers van Fraunhofer IFF PARU ontwikkeld, een gepatenteerde nieuwe technologie voor het bewaken van werkruimtes.
Projector- en cameratechnologie
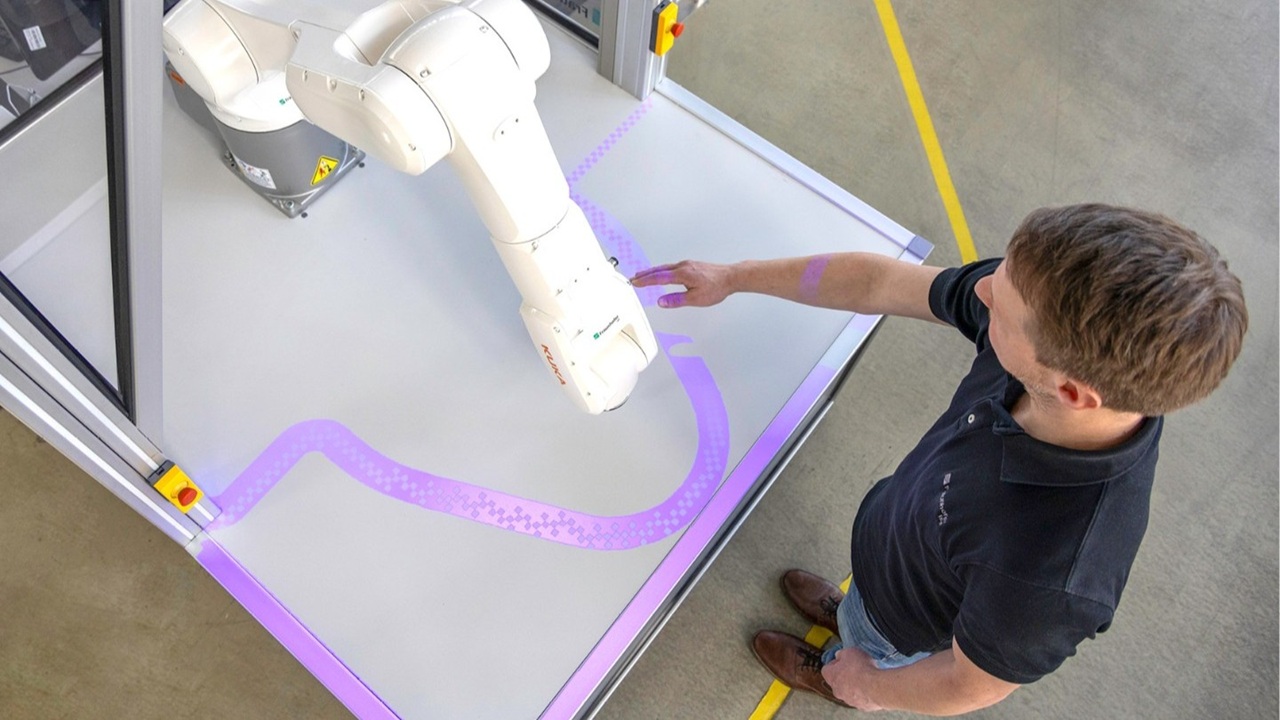
PARU maakt gebruik van geavanceerde projector- en cameratechnologie om zichtbare waarschuwings- en beschermingsvelden direct rond de machine te projecteren en te herkennen wanneer mensen de veiligheidszones betreden. “Nadat de projector en de twee camera’s zijn gekalibreerd, worden als eerste stap virtuele verwachtingsbeelden gegenereerd. Vervolgens projecteert de projector een zichtbaar lichtgordijn rond de robot en het op te pakken onderdeel, volgens de afstandsformule zoals vastgelegd in de norm ISO/TS 15066. Dit lichtgordijn fungeert als een veiligheidslijn en visualiseert voor medewerkers de beschermende ruimte die mensen vrij moeten houden”, legt Norbert Elkmann, hoofd van de afdeling Robotica bij Fraunhofer IFF, uit.
Vertrouwen bevorderen
De veiligheidszones worden dynamisch aangepast aan de bewegingen van de machine, omdat PARU altijd rekening houdt met de huidige status van de robot. Dit maakt het ideaal voor gebruik in cognitieve robotica. “Onze technologie is uniek. Geen enkel ander systeem maakt een kleinere afstand tussen mens en robot mogelijk, terwijl het voldoet aan de specificaties van de geldende normen en tegelijkertijd zo weinig ruimte nodig heeft. Dit is mogelijk omdat de camera’s en sensoren niet alleen torso’s, armen en hoofden herkennen, maar zelfs vingers”, aldus Elkmann.
Projectie
Een ander voordeel is dat de projectie de werknemer ook kan laten zien waar de robot zich als volgende stap zal bewegen. Dit vergroot het vertrouwen in het werken met machines. De extra gecodeerde, zichtbare veiligheidslijnen werken onafhankelijk van de lichtinval en -omstandigheden. Als de camera’s of projectoren niet meer werken, wordt het hele systeem automatisch uitgeschakeld.
CAS: intelligente softwareoplossingen voor adaptieve robotsystemen
Fraunhofer IFF heeft met Computer Aided Safety (CAS), een pakket digitale veiligheidsoplossingen. Het maakt mens-robotsamenwerking (HRC) efficiënt, kosteneffectief en veilig . Kant-en-klare softwaremodules zijn beschikbaar voor het efficiënt berekenen van veilige afstanden en snelheden. Digitale assistenten ondersteunen de risicobeoordeling en veiligheidsgoedkeuringsprocessen en maken het met name voor nieuwkomers gemakkelijker om nauwkeurig en efficiënt te voldoen aan alle verplichtingen van de EU-machinerichtlijn.
Digitaal
In tegenstelling tot de botsmeetfunctie werkt de veiligheidsgoedkeuringstool volledig digitaal. Er wordt rekening gehouden met parameters zoals botskracht en pijngrens om de maximaal toegestane snelheid van de robot te bepalen. De modules kunnen optioneel worden geïntegreerd in elk type robotbesturing of bestaande simulatieomgeving voor planningsdoeleinden, om economische specificaties nauwkeurig af te stemmen op de geldende veiligheidseisen. Dit voorkomt planningsfouten en bespaart op engineeringkosten.
Openingsfoto:
De gepatenteerde PARU-veiligheidstechnologie genereert zichtbare lichtgordijnen rond het gebied waar de robot werkt. De verlichte blauwe veiligheidslijnen passen zich dynamisch aan de bewegingen van de machine aan, wat een veilige interactie tussen mens en AI-gestuurde robots mogelijk maakt (foto: Fraunhofer IFF, Anne Bornkessel)
Lees ook: TOP 5 trends in robotica in 2025