Nieuwe ontwikkelingen maken grijpers nauwkeuriger en flexibeler
Een tweetal nieuwe ontwikkelingen op het gebied van grijpers kunnen de nauwkeurigheid en mogelijkheid waarmee robotarmen objecten vastpakken verbeteren. Het gaat om een speciaal soort grijper geïnspireerd op de vleesetende plant en een systeem dat robotarmen helpt te bepalen hoe een afwijkende object kunnen worden opgepakt en gemanipuleerd.
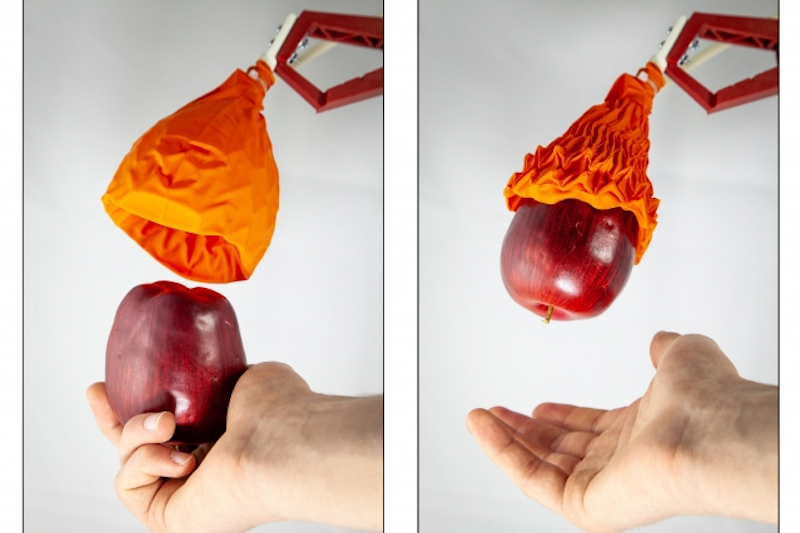
Beide ontwikkelingen komen uit de koker van het MIT. De grijper wordt door de universiteit de ‘origami robot gripper’ genoemd en bestaat uit een kegelvormige origami structuur die over een object wordt geplaatst en vervolgens ‘inklapt’, waardoor het materiaal zich om het object heen vouwt. Dit biedt allerlei voordelen. Zo wordt de kracht die de grijper op een object uitoefent over een breed gebied verdeeld, waardoor de grijper ook delicate objecten kan oppakken zonder schade te veroorzaken.
Flexibiliteit
De grijper geeft robotarmen ook veel flexibiliteit. Zo kan de grijper uiteenlopende objecten met allerlei vormen oppakken, aangezien de vorm van de grijper na het dichtklappen automatisch wordt aangepast aan de vorm van het object. Zo kan de grijper soepblikken, hamers, wijnglazen, drones en individuele broccoli roosjes oppakken. De grijper kan objecten tot 70% van de zijn eigen diameter oppakken. Ook konden flessen met een gewicht van bijna 2 kilogram worden opgetild.
“Bedrijven als Amazon en JD willen in staat zijn een bredere reeks delicate of onregelmatig gevormde objecten op te pakken, maar kunnen dit niet met vinger-gebaseerde grijpers of grijpers met zuignappen”, aldus Shuaguang Li, een postdoc van MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) en Harvard’s John A. Paulson School of Engineering and Applied Sciences. “Zuignappen kunnen geen dingen met gaten oppakken – en zij hebben iets veel sterkers nodig dan grijpers met zachte vingers.” Met de origami robot gripper hebben de onderzoekers hiervoor een oplossing ontwikkeld.
Meer informatie over de origami robot gripper is hier te vinden.
Keypoint Affordance Manipulation
Ook de tweede ontwikkeling komt uit de koker van MIT’S CSAIL. Het gaat om een systeem genaamd ‘Keypoint Affordance Manipulation (KPAM), dat robots in staat stelt afwijkende objecten nauwkeurig op te pakken. Dit doet het systeem door een object te scannen en hiervan coördinaten – die ook wel keypoints worden genoemd – in beeld te brengen.
KPAM kan de inzetbaarheid van robotarmen vergroten. Zo kunnen robotarmen doorgaans niet goed omgaan met objecten die zij niet eerder hebben gezien. Dit levert beperkingen op, onder meer doordat robotarmen niet goed kunnen in staat zijn producten die afwijkingen vertonen te manipuleren. Dit betekent in de praktijk dat zij vooral geschikt zijn om in zeer gestructureerde omgevingen objecten geautomatiseerd op te pakken. KPAM biedt uitkomst en geeft robotarmen veel meer flexibiliteit om met afwijkingen om te gaan.
Bruikbare manipulaties mogelijk maken
De coördinaten die KPAM verzamelt geven robots een beter begrip van het object dat zij willen oppakken. De betrokken onderzoekers stellen dat het systeem slechts drie coördinaten nodig heeft om relatief uniforme objecten zoals een koffiekop op te pakken. Voor objecten als slippers en schoenen zijn zes coördinaten nodig. “Door slechts een klein beetje meer te snappen van het object – de locatie van enkele belangrijke punten – is voldoende om een brede reeks bruikbare manipulaties mogelijk te maken”, legt Russ Tedrake, als hoogleraar verbonden aan het MIT, uit. “Robots kunnen bijna alles oppakken, maar als zij het object nog niet eerder gezien hebben kunnen zij deze doorgaans niet op een betekenisvolle manier neerzetten.”
In een video demonstreren de onderzoekers de werking van KPAM. Zo is onder meer te zien hoe de robot in staat is koffiekoppen een haken op te hangen en schoenen in een schoenenrek te plaatsen.
Meer informatie over KPAM is hier beschikbaar.
Auteur: Wouter Hoeffnagel
Bron: MIT CSAIL
Meer nieuws
300.000 subsidie voor Meer met Minder in de Maakindustrie

(productnews)
Algemeen / 22-10-2024
Lees meerAdditive manufacturing kan lucht- en ruimtevaart groener maken

(productnews)
Energie / 21-10-2024
Lees meerHUPICO brengt AMR’s van wheel.me in Benelux op de markt

(productnews)
High tech / 21-10-2024
Lees meerKabinet tekent intentieverklaringen met twee bedrijven voor CO2-reductie
