Algoritme laat soft robots rigide worden
Afbeelding: James Bern en Daniela Rus van CSAIL MIT
De meeste robots zijn voorzien van een rigide behuizing. Voor sommige toepassingen is dit echter niet ideaal en kiezen ontwerpers voor een zachte behuizing. Hoewel zo’n soft robot bijvoorbeeld veiliger kan samenwerken met mensen, leveren zij hierbij in op bijvoorbeeld sterkte en nauwkeurigheid. Dankzij een ontwikkeling van het MIT is dat in de toekomst wellicht niet meer nodig.
Een nieuw concept ontwikkeld door onderzoekers van MIT maakt het mogelijk robots te voorzien van een zachte behuizing die op commando rigide kan worden. De onderzoekers stellen dat dit een nieuwe generatie robots mogelijk maakt die het beste van twee werelden combineert: de sterkte en nauwkeurigheid van een rigide robot met de vloeiendheid en veiligheid van een zachte robot.
“Het is de eerste stap in onze poging het beste van twee werelden te krijgen”, zegt onderzoeker James Bern, postdoc in MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) en hoofdauteur van de paper die de onderzoekers over het onderwerp hebben geschreven. Het onderzoek wordt volgende maand door Bern op de IEEE International Conference on Soft Robotics gepresenteerd. Naast Bern was ook CSAIL directeur Daniele Rus betrokken bij de onderzoekspaper.
Aansturing van soft robots is complex
Een belangrijke uitdaging bij soft robots is volgens onderzoekers de aansturing. Waar robots met een rigide behuizing vaak geautomatiseerd kunnen worden aangestuurd, is dit bij soft robots een grotere uitdaging. Tot nu toe werden de meeste soft robots dan ook handmatig bestuurd, wat de toepassingen beperkt.
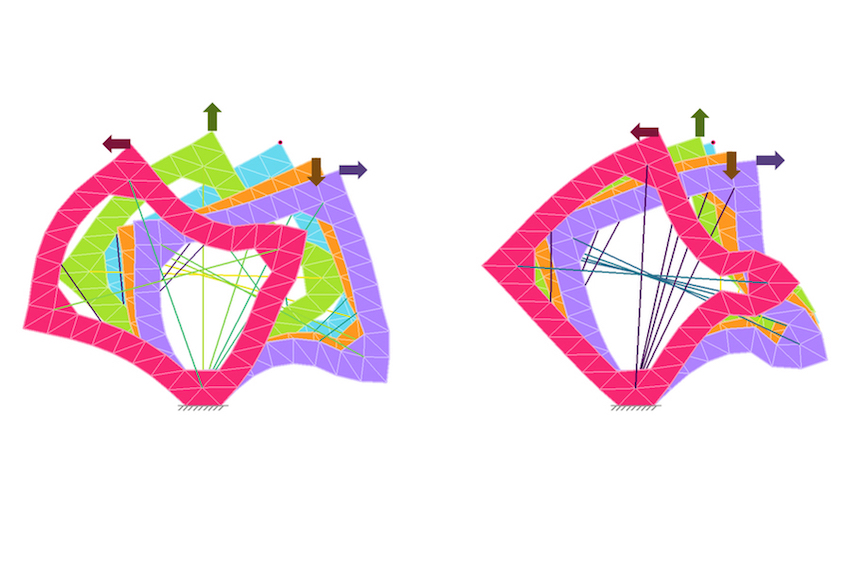
Bern ontwikkelde in 2017 samen met collega’s echter een algoritme dat hier verandering in bracht. Dit algoritme maakt gebruik van een simulatie voor het besturen van een met kabels aangestuurde soft robot. Dankzij deze simulatie kan het algoritme berekenen hoeveel het aan ieder touwtje moet trekken om een door de onderzoekers opgegeven positie te bereiken. Een vergelijkbaar proces vindt plaats in ons lichaam op het moment dat wij iets willen bereiken. Zo wordt een doelpositie voor onze hand vertaald in samenspanningen van de spieren in onze arm, meldt MIT in een nieuwsbericht.
Het algoritme dat in 2017 werd gepresenteerd
Zachte behuizing rigide maken
Dit algoritme gebruiken de onderzoekers nu ook om de zachte behuizing van een robot rigide te maken. Door bijvoorbeeld de biceps in een arm aan te spannen buigt de elleboog, terwijl het aanspannen van de triceps de arm juist strekt. Door het gelijktijdig aanspannen van beide spieren kan de arm echter in een positie worden vastgezet. Ditzelfde principe passen de onderzoekers toe op robots.
Door een soft robot te voorzien van meerdere kabels is het mogelijk de robot gelijktijdig rigide te laten worden en te laten bewegen. Hierbij worden sommige kabels gebruikt om de robot bijvoorbeeld te laten buigen en draaien, terwijl andere kabels gelijktijdig worden ingezet voor het bepalen van de rigiditeit van de robot.
Prototype in ontwikkeling
De werking van het systeem is door Bern alleen tijdens simulaties getest. De onderzoeker werkt nu aan een prototype robot om de methode in de praktijk te testen. Op termijn hoopt Bern op toepassingen van de technologie buiten het lab. “Interactie met mensen is absoluut een visie voor soft robotics”, aldus Bern. Hij voorziet onder meer toepassingen met zorgrobots. De zachte behuizing van de robot de veiligheid vergroten, terwijl de robot rigide kan worden indien bijvoorbeeld een patiënt moet worden opgetild.
Auteur: Wouter Hoeffnagel
Meer nieuws
GE Healthcare neemt ontwikkelaar van AI voor medische beelden over

(productnews)
Medisch & Zorg / 23-07-2024
Lees meerAI-gestuurde videoanalyse in de controlekamer verhoogt productiviteit en veiligheid

(productnews)
High tech / 22-07-2024
Lees meerOnderhoud- en servicebedrijven presteren in Q2 bovengemiddeld; machinebouwers juist ondergemiddeld

(productnews)
Algemeen / 22-07-2024
Lees meerImportheffingen op EV’s: Model 3 is duurder en mogelijke uitzondering voor BMW en Volkswagen
